


Quick Links
1. Software Toolchain Setup
To compile (and debug) executables for the NEORV32 a RISC-V-compatible toolchain is required. By default, the project’s software framework uses the GNU C Compiler RISC-V port "RISC-V GCC". Basically, there are two options to obtain such a toolchain:
-
Download and build the RISC-V GNU toolchain by yourself.
-
Download and install a prebuilt version of the toolchain.
|
Default GCC Prefix
The default toolchain prefix for this project is riscv-none-elf-.
This default prefix can be chanced by the RISCV_PREFIX variable in the NEORV32 application makefile(s).
|
Toolchain Requirements
|
Library/ISA Considerations
Note that a toolchain build with --with-arch=rv32imc provides library code (like the C standard library)
compiled entirely using compressed (C) and mul/div instructions (M). Hence, this pre-compiled library
code CANNOT be executed (without emulation) on an architecture that does not support these ISA extensions.
|
Building the Toolchain from Scratch
The official RISC-V GCC GitHub repository (https://github.com/riscv-collab/riscv-gnu-toolchain) provides instructions for building the toolchain from scratch:
rv32i (minimal ISA only in this example)$ git clone https://github.com/riscv/riscv-gnu-toolchain
$ cd riscv-gnu-toolchain
$ riscv-gnu-toolchain$ ./configure --prefix=/opt/riscv --with-arch=rv32i --with-abi=ilp32
$ riscv-gnu-toolchain$ makeNote that this configuration will build a GCC toolchain with riscv32-unknown-elf- as prefix / GCC triplet.
Hence, you need to adjust the RISCV_PREFIX variable accordingly before running any NEORV32 makefiles.
Downloading and Installing a Prebuilt Toolchain
Alternatively, a prebuilt toolchain can be used. Some OS package managers provide embedded RISC-V GCC toolchain. However, I can highly recommend the toolchain provided by the X-Pack project (MIT license): https://github.com/xpack-dev-tools/riscv-none-elf-gcc-xpack
Toolchain Installation
To integrate the toolchain of choice into the NEORV32 software framework, the toolchain’s binaries need
to be added to the system path (e.g. PATH environment variable) so they can be used by a shell. Therefore,
the absolute path to the toolchain’s bin folder has to be appended to the PATH variable:
$ export PATH=$PATH:/opt/riscv/bin|
bashrc
This command can be added to .bashrc (or similar) to automatically add the RISC-V
toolchain at every console start.
|
To make sure everything works fine, navigate to an example project in the NEORV32 sw/example folder and
execute the following command:
neorv32/sw/example/demo_blink_led$ make checkThis will test all the tools required for generating NEORV32 executables. Everything is working fine if "Toolchain check OK" appears at the end of the log output.
2. General Hardware Setup
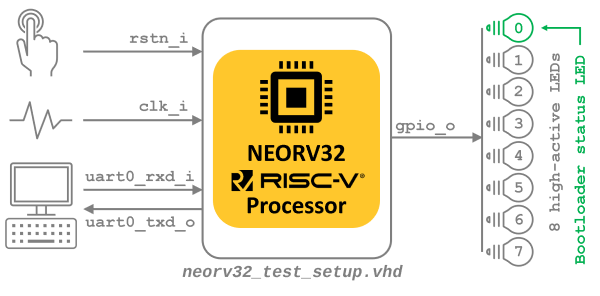
This guide shows the basics of setting up a NEORV32 project for simulation or synthesis from scratch. It uses a simple, exemplary test "SoC" setup of the processor to keep things simple at the beginning. This simple setup is intended for a first test / evaluation of the processor.
The NEORV32 project features three minimalist pre-configured test setups in
rtl/test_setups.
These test setups only implement very basic processor and CPU features and mainly
differ in the actual boot configuration.
rtl/test_setups/neorv32_test_setup_bootloader.vhd)-
Create a new project with your FPGA/ASIC/simulator EDA tool of choice.
-
Add all VHDL files from the project’s
rtl/corefolder to your project. Make sure to add all these rtl files to a new library calledneorv32. If your toolchain does not provide a field to enter the library name, check out the "properties" menu of the added rtl files.
|
Compile Order and File-List Files
Some tools (like Lattice Radiant) might require a manual compile order of the VHDL source files to
identify the dependencies. The rtl folder features file-list files that list all required HDL files in
their recommended compilation order (see https://stnolting.github.io/neorv32/#_file_list_files).
|
-
The
rtl/core/neorv32_top.vhdVHDL file is the top entity of the NEORV32 processor, which can be instantiated within a user project. However, in this tutorial we will use one of the pre-defined test setups fromrtl/test_setupsas top entity.
|
NEORV32 VHDL Package
Make sure to include the neorv32 package into your design when instantiating the processor: add
library neorv32; and use neorv32.neorv32_package.all; to your design unit.
|
-
Add the pre-defined test setup of choice to the project, too, and select it as top entity.
-
The entity of the test setups provides a minimal set of configuration generics, that might have to be adapted to match your FPGA and board:
generic (
-- adapt these for your setup --
CLOCK_FREQUENCY : natural := 100000000; (1)
IMEM_SIZE : natural := 16*1024; (2)
DMEM_SIZE : natural := 8*1024 (3)
);| 1 | Clock frequency of clk_i signal in Hertz |
| 2 | Default size of internal instruction memory: 16kB |
| 3 | Default size of internal data memory: 8kB |
-
If your FPGA does not provide sufficient resources you can modify the memory sizes (
IMEM_SIZEandDMEM_SIZE). -
The actual clock frequency (Hz) of the top’s clock input signal (
clk_i) needs to be defined using theCLOCK_FREQUENCYgeneric.
-
Assign the signals of the test setup top entity to the according pins of your FPGA board. All the signals can be found in the entity declaration of the corresponding test setup, e.g.:
neorv32_test_setup_bootloader.vhdport (
-- Global control --
clk_i : in std_ulogic; -- global clock, rising edge
rstn_i : in std_ulogic; -- global reset, low-active, async
-- GPIO --
gpio_o : out std_ulogic_vector(7 downto 0); -- parallel output
-- UART0 --
uart0_txd_o : out std_ulogic; -- UART0 send data
uart0_rxd_i : in std_ulogic -- UART0 receive data
);|
Signal Polarity
If your FPGA board has inverse polarity for certain input/output you need to add inverters. Example: The reset signal
rstn_i is low-active by default; the LEDs connected to gpio_o are high-active by default.
|
-
Attach the clock input
clk_ito your clock source and connect the reset linerstn_ito a button of your FPGA board. Check whether it is low-active or high-active - the reset signal of the processor is low-active, so maybe you need to invert the input signal. -
If possible, connected at least bit
0of the GPIO output portgpio_oto a LED (see "Signal Polarity" note above). -
If your are using a UART-based test setup connect the UART communication signals
uart0_txd_oanduart0_rxd_ito the host interface (e.g. a USB-UART converter). -
If you are using the on-chip debugger setup connect the processor’s JTAG signal
jtag_*to a suitable JTAG adapter. -
Perform the project HDL compilation (synthesis, mapping, placement, routing, bitstream generation).
-
Program the generated bitstream into your FPGA and press the button connected to the reset signal.
-
The LED(s) connected to
gpio_oshould be flashing now.
3. Application Program Compilation
This guide shows how to compile a C-code application for the NEORV32 processor.
-
Open a terminal console and navigate to one of the project’s example programs. For instance, navigate to the simple
sw/example_demo_blink_ledexample program. This program uses the GPIO controller to display an 8-bit counter on the lowest eight bit of thegpio_ooutput port. -
To compile the project and generate an executable simply execute:
neorv32/sw/example/demo_blink_led$ make clean_all exe-
The
cleantarget is used to ensure everything is re-build. -
The
exetarget will compile and link the application sources together with all the included libraries. At the end an ELF file (main.elf) is generated. The NEORV32 image generator (insw/image_gen) takes this file and creates the final executable (neorv32_exe.bin). The makefile will show the resulting memory utilization and the executable size:
neorv32/sw/example/demo_blink_led$ make clean_all exe
Memory utilization:
text data bss dec hex filename
1004 0 0 1004 3ec main.elf
Compiling ../../../sw/image_gen/image_gen
Executable (neorv32_exe.bin) size in bytes:
1016|
Build Artifacts
All intermediate build artifacts (like object files and binaries) will be places into a (new) project-local
folder named build. The main ELF and the actual executable will be placed in the root project folder.
|
-
The
exetarget has created the actual executableneorv32_exe.binin the current folder that is ready to be uploaded to the processor using the build-in bootloader. Additionally, themain.elffile can be uploaded using the on-chip debugger.
4. Installing an Executable Directly Into Memory
An application can be installed as non-volatile image to the internal instruction memory (IMEM) so that it gets executed right after reset. For this concept the IMEM gets implemented as pre-initialized ROM that gets initialized during FPGA bitstream programming.
-
Configure the processor boot mode
BOOT_MODE_SELECTto "Boot IMEM Image" (select value 2). This boot mode requires the processor-internal instruction memory (IMEM) so ensure is is enabled (IMEM_EN).
BOOT_MODE_SELECT => 2, -- boot from pre-initialized IMEM-ROM
IMEM_EN => true, -- implement processor-internal instruction memory-
Regenerate and re-install the default IMEM initialization file (
rtl/core/neorv32_imem_image.vhd) so that it contains the image of your actual application firmware.
neorv32/sw/example/demo_blink_led$ make clean_all image install
Memory utilization:
text data bss dec hex filename
22192 1352 4216 27760 6c70 main.elf
Compiling image generator...
Generating neorv32_imem_image.vhd
Installing application image to ../../../rtl/core/neorv32_imem_image.vhd-
Rerun FPGA synthesis and upload the bitstream. Your application code now resides non-volatile in the processor’s IMEM and is executed right after reset.
5. Adding Custom Hardware Modules
In resemblance to the RISC-V ISA, the NEORV32 processor was designed to ease customization and extensibility. The processor provides several predefined options to add application-specific custom hardware modules and accelerators. A coarse Comparative Summary is given at the end of this section.
5.1. Standard (External) Interfaces
The processor already provides a set of standard interfaces that are intended to connect chip-external devices. However, these interfaces can also be used chip-internally. The most suitable interfaces are GPIO, UART, SPI and TWI.
The SPI and especially the GPIO interfaces might be the most straightforward approaches since they have a minimal protocol overhead. Beyond simplicity, these interface only provide a very limited bandwidth and require more sophisticated software handling ("bit-banging" for the GPIO). Hence, it is not recommend to use them for chip-internal communication.
5.2. External Bus Interface
The External Bus Interface provides the classic approach for attaching custom IP. By default, the bus interface implements the widely adopted Wishbone interface standard. This project also includes wrappers to convert to other protocol standards like ARM’s AXI4 or Intel’s Avalon protocols. By using a full-featured bus protocol, complex SoC designs can be implemented including several modules and even multi-core architectures. Many FPGA EDA tools provide graphical editors to build and customize whole SoC architectures and even include pre-defined IP libraries.
Custom hardware modules attached to the processor’s bus interface have no limitations regarding their functionality. User-defined interfaces (like DDR memory access) can be implemented and the according hardware module can operate completely independent of the CPU.
The bus interface uses a memory-mapped approach. All data transfers are handled by simple load/store operations since the external bus interface is mapped into the processor’s address space. This allows a very simple still high-bandwidth communications. However, high bus traffic may increase access latency. In addition, the processor’s DMA controller can also used to/from transfer data to processor-external modules.
|
Debugging/Testing Custom Hardware Modules
Custom hardware IP modules connected via the external bus interface or integrated as CFU can be debugged "in-system" using the
"bus explorer" example program (sw/example_bus_explorer). This program provides an interactive console (via UART0)
that allows to perform arbitrary read and write access from/to any memory-mapped register.
|
5.3. Custom Functions Subsystem
The Custom Functions Subsystem (CFS) is an "empty" template for a memory-mapped, processor-internal module.
The basic idea of this subsystem is to provide a convenient, simple and flexible platform, where the user can concentrate on implementing the actual design logic rather than taking care of the communication between the CPU/software and the design logic. Note that the CFS does not have direct access to memory. All data (and control instruction) have to be send by the CPU.
The use-cases for the CFS include medium-scale hardware accelerators that need to be tightly-coupled to the CPU. Potential use cases could be DSP modules like CORDIC, cryptography accelerators or custom interfaces (like IIS).
5.4. Custom Functions Unit
The Custom Functions Unit (CFU) is a functional unit that is integrated right into the CPU’s pipeline. It allows to implement custom RISC-V instructions. This extension option is intended for rather small logic that implements operations, which cannot be emulated in pure software in an efficient way. Since the CFU has direct access to the core’s register file it can operate with minimal data latency.
5.5. Comparative Summary
The following table gives a comparative summary of the most important factors when choosing one of the chip-internal extension options:
-
Custom Functions Unit (CFU) for CPU-internal custom RISC-V instructions
-
Custom Functions Subsystem (CFS) for tightly-coupled processor-internal co-processors
-
External Bus Interface (WISHBONE) for processor-external memory-mapped modules
| Custom Functions Unit (CFU) | Custom Functions Subsystem (CFS) | External Bus Interface | |
|---|---|---|---|
RTL location |
CPU-internal |
processor-internal |
processor-external |
HW complexity/size |
small |
medium |
large |
CPU-independent operation |
no |
yes |
yes |
CPU interface |
register file access |
memory-mapped |
memory-mapped |
Low-level access mechanism |
custom instructions |
load/store |
load/store |
Access latency |
low |
medium |
medium to high |
External IO interfaces |
not supported |
yes, but limited |
yes, user-defined |
Exception capability |
yes |
no |
no |
Interrupt capability |
no |
yes |
user-defined |
6. Packaging the Processor as Vivado IP Block
Packaging the entire processor as IP module allows easy integration of the core (or even several cores)
into a block-design-based Vivado project. The NEORV32 repository provides a full-scale TCL script that
automatically packages the processor as Vivado IP block including an interactive configuration GUI.
For this, a specialized wrapper for the processor’s top entity is provided
(rtl/system_integration/neorv32_vivado_ip.vhd) that features AXI4-compatible (via XBUS)
and AXI4-Stream-compatible (via SLINK) interfaces.
|
General AXI Wrapper
The provided AXI4-bridge can also be used for custom (AXI) setups outside of Vivado and/or IP block designs.
|

Besides packaging the HDL modules, the TCL script also generates an interactive customization GUI that allows an easy and intuitive configuration of the processor. The rather complex VHDL configuration generics are abstracted and provided with tool tips to make it easier to understand the different configuration options.
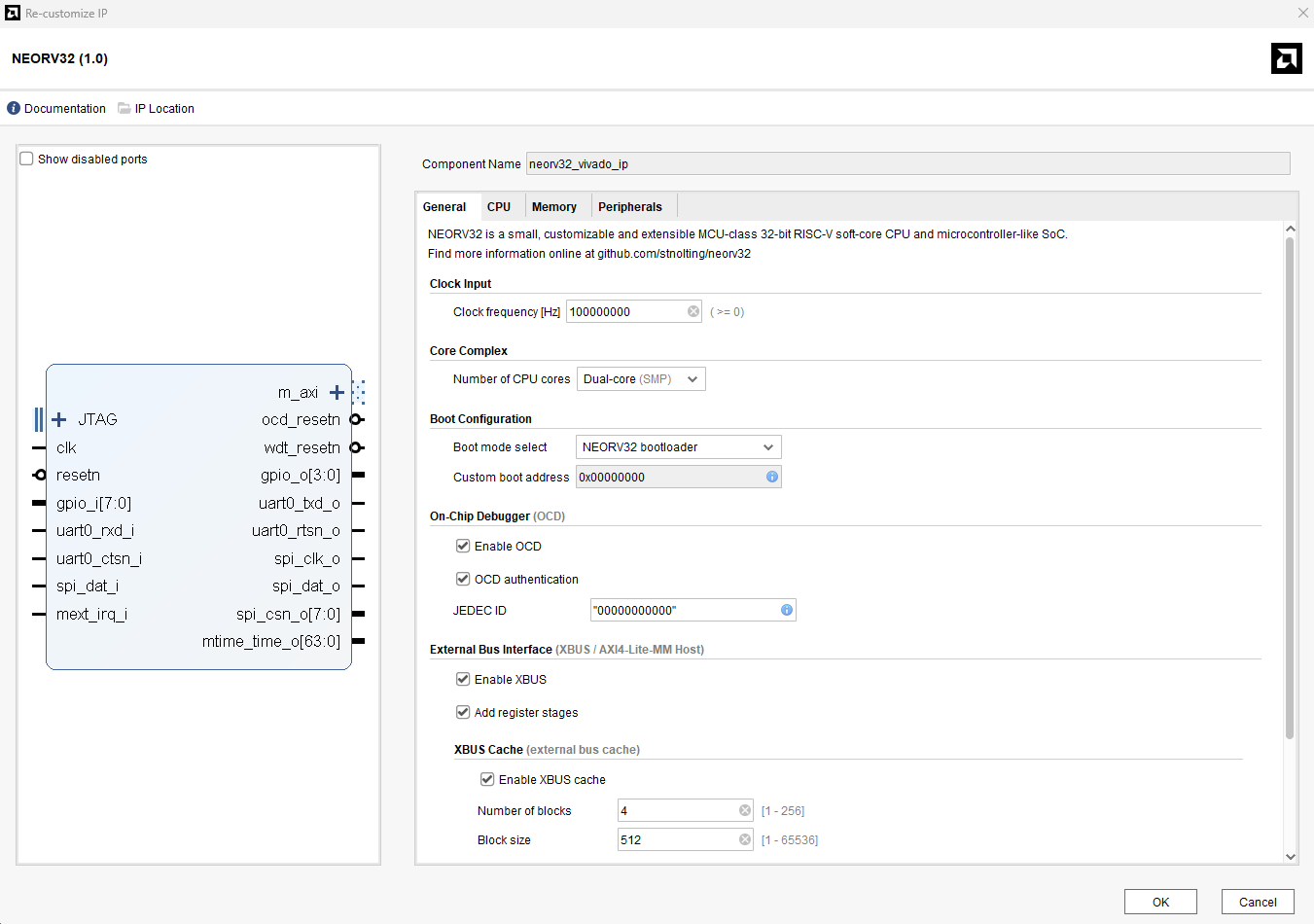
The following steps show how to package the processor using the provided TCL script
(neorv32/rtl/system_integration/neorv32_vivado_ip.tcl)
and how to import the generated IP block into the Vivado IP repository.
Packaging from within a Vivado Project (recommended)
-
Open your Vivado block design.
-
Open the TCL shell ("Window → Tcl Console") to manually invoke the script.
-
Use
cdin the TCL console to navigate to the project’sneorv32/rtl/system_integrationfolder. -
Execute
source neorv32_vivado_ip.tclin the TCL console. -
A second Vivado instance will open automatically packaging the IP module. After this process is completed, the second Vivado instance will automatically close again.
-
A new folder
neorv32_vivado_ip_workis created inneorv32/rtl/system_integrationwhich contains the IP-packaging Vivado project. -
The
packaged_ipsub-folder provides the actual IP module which is automatically added to the project’s IP repository. -
You will find the NEORV32 in the "User Repository" section of the Vivado IP catalog.
Stand-Alone Packaging
-
Start Vivado.
-
On the splash screen select "Tools → Run TCL Script".
-
Navigate to the
neorv32/rtl/system_integrationfolder and selectneorv32_vivado_ip.tcl. -
A second Vivado instance will open automatically packaging the IP module. After this process is completed, the second Vivado instance will automatically close again.
-
A new folder
neorv32_vivado_ip_workis created inneorv32/rtl/system_integrationwhich contains the IP-packaging Vivado project. -
The
packaged_ipsub-folder provides the actual IP module. -
Open your custom design where you want to integrate the NEORV32 IP module.
-
Click on "Settings" in the "Project Manager" on the left side.
-
Under "Project Settings" expand the "IP" section and click on "Repository".
-
Click the large plus button and select the previously generated IP folder (
path/to/neorv32/rtl/system_integration/neorv32_vivado_ip_work/packaged_ip). -
Click "Select" and close the Settings menu with "Apply" and "OK".
-
You will find the NEORV32 in the "User Repository" section of the Vivado IP catalog.
|
Combinatorial Loops DRC Errors
If the TRNG is enabled it is recommended to add the following commands to the project’s constraints file in order
to prevent DRC errors during bitstream generation.
|
set_property SEVERITY {warning} [get_drc_checks LUTLP-1]
set_property IS_ENABLED FALSE [get_drc_checks LUTLP-1]
set_property ALLOW_COMBINATORIAL_LOOPS TRUE|
Re-Packaging the IP Core
For every change that is made to the hardware RTL code (excluding configuration made via the customization GUI)
the NEORV32 IP module needs to be re-packaged by re-executing the packing script (neorv32_vivado_ip.tcl).This also applies if an executable installed right into the IMEM shall be updated. It is not possible to replace the IMEM image ( neorv32_imem_image.vhd) file in the packaged_ip folder. For the Vivado design suite, the new program to be executed must
be compiled and installed using the install makefile target. Next, the neorv32_vivado_ip.tcl script has to be executed again.
Finally, Vivado will prompt to upgrade the NEORV32 IP.
|
|
Out-of-Context Synthesis
If NEORV32 configurations do not take effect, try using the out-of-context synthesis option.
|
|
Incremental Compilation of Simulation Sources (ISIM)
When using AMD Vivado (XSIM for simulation) make sure to TURN OFF "incremental compilation" (Project Setting
→ Simulation → Advanced → _Enable incremental compilation). This will slow down simulation relaunch but will
ensure that all application images (*_image.vhd) are reanalyzed when recompiling the NEORV32 application or bootloader.
|
7. Simulating the Processor
Due to the complexity of the NEORV32 processor and all the different configuration options, there is a wide range of possible testing and verification strategies.
On the one hand, a simple smoke testbench allows ensuring that functionality is correct from a software point of view.
That is used for running the RISC-V architecture tests, in order to guarantee compliance with the ISA specification(s).
All required simulation sources are located in sim.
On the other hand, VUnit and Verification Components are used for verifying the functionality of the various peripherals from a hardware point of view.
|
AMD Vivado / ISIM - Incremental Compilation
When using AMD Vivado (ISIM for simulation) make sure to TURN OFF "incremental compilation" (Project Settings
→ Simulation → Advanced → _Enable incremental compilation). This will slow down simulation relaunch but will
ensure that all application images (*_image.vhd) are reanalyzed when recompiling the NEORV32 application or bootloader.
|
7.1. Testbench
A plain-VHDL testbench without any third-party libraries / dependencies (sim/neorv32_tb.vhd) can be used for simulating
and testing the processor and all its configurations. This testbench features clock and reset generators and enables all
optional peripheral and CPU extensions. The processor check program (sw/example/processor_check) is develop in close
relation to the default testbench in order to test all primary processor functions.
The simulation setup is configured via the "User Configuration" section located right at the beginning of the testbench architecture. Each configuration generic provides a default value and a comments to explain the functionality. Basically, these configuration generics represent most of the processor’s top generics.
|
UART output during simulation
Data written to the NEORV32 UART0 / UART1 transmitter is send to a virtual UART receiver implemented as part of the default
testbench. The received chars are send to the simulator console and are also stored to a log file (tb.uart0_rx.log
for UART0, tb.uart1_rx.log for UART1) inside the simulator’s home folder. Please note that printing via the
native UART receiver takes a lot of time. For faster simulation console output see section Faster Simulation Console Output.
|
7.2. Faster Simulation Console Output
When printing data via the physical UART the communication speed will always be based on the configured BAUD rate. For a simulation this might take some time. To have faster output you can enable the simulation mode for UART0/UART1 (see section https://stnolting.github.io/neorv32/#_primary_universal_asynchronous_receiver_and_transmitter_uart0). TX data sent to UART0 / UART1 will be immediately printed to the simulator console instead of being transmitted via the physical UART TX line.
|
Automatic Simulation Mode
You can "automatically" enable the simulation mode of UART0/UART1 when compiling an application. In this case, the "real"
UART0/UART1 transmitter unit is permanently disabled by setting the UART’s "sim-mode" bit.
To enable the simulation mode just compile and install the application and add -DUART0_SIM_MODE -DUART0_SIM_MODE /
-DUART1_SIM_MODE to the compiler’s USER_FLAGS variable (do not forget the -D suffix flag):
|
sw/example/demo_blink_led$ make USER_FLAGS+=-DUART0_SIM_MODE clean_all all7.3. GHDL Simulation
The default simulation setup that is also used by the project’s CI pipeline is based on the free and open-source VHDL
simulator GHDL. The sim folder also contains a simple script that evaluates and simulates all core files.
This script can be called right from the command. Optionally, additional GHDL flags can be passes.
neorv32/sim$ sh ghdl.sh --stop-time=20ms7.4. Simulation using Application Makefiles
The GHDL Simulation can also be started by the main application makefile (i.e. from each SW project folder).
sw/example/demo_blink_led$ make USER_FLAGS+=-DUART0_SIM_MODE clean_all install sim
[...]
Blinking LED demo programMakefile targets:
-
clean_all: delete all artifacts and rebuild everything -
install: install executable -
sim: run GHDL simulation
|
Adjusting the Testbench Configuration
The testbench provides several generics for customization. These can be adjusted in-console using the
makefile’s GHDL_RUN_FLAGS variable. E.g.: make GHDL_RUN_FLAGS+="-gBOOT_MODE_SELECT=1" sim
|
7.4.1. Hello World!
To do a quick test of the NEORV32 make and the required tools navigate to the project’s sw/example/hello_world
folder and run make USER_FLAGS+=-DUART0_SIM_MODE clean install sim:
neorv32/sw/example/hello_world$ make USER_FLAGS+=-DUART0_SIM_MODE clean install sim
../../../sw/lib/source/neorv32_uart.c: In function 'neorv32_uart_setup':
../../../sw/lib/source/neorv32_uart.c:80:2: warning: #warning UART0_SIM_MODE (primary UART) enabled! Sending all UART0.TX data to text.io simulation output instead of real UART0 transmitter. Use this for simulation only! [-Wcpp] (1)
80 | #warning UART0_SIM_MODE (primary UART) enabled! \
| ^~~~~~~
Memory utilization:
text data bss dec hex filename
5596 0 116 5712 1650 main.elf (2)
Compiling image generator...
Generating neorv32_imem_image.vhd
Installing application image to ../../../rtl/core/neorv32_imem_image.vhd (3)
Simulating processor using default testbench...
GHDL simulation run parameters: --stop-time=10ms (4)
../rtl/core/neorv32_top.vhd:329:5:@0ms:(assertion note): [NEORV32] The NEORV32 RISC-V Processor (v1.11.6.0), github.com/stnolting/neorv32
../rtl/core/neorv32_top.vhd:335:5:@0ms:(assertion note): [NEORV32] Processor Configuration: CPU (smp-dual-core) IMEM-ROM DMEM I-CACHE D-CACHE XBUS CLINT GPIO UART0 UART1 SPI SDI TWI TWD PWM WDT TRNG CFS NEOLED GPTMR ONEWIRE DMA SLINK SYSINFO OCD OCD-AUTH OCD-HWBP
../rtl/core/neorv32_top.vhd:388:5:@0ms:(assertion note): [NEORV32] BOOT_MODE_SELECT = 2: booting IMEM image
../rtl/core/neorv32_cpu.vhd:130:5:@0ms:(assertion note): [NEORV32] CPU ISA: rv32iabmux_zaamo_zalrsc_zba_zbb_zbkb_zbkc_zbkx_zbs_zicntr_zicond_zicsr_zifencei_zihpm_zfinx_zkn_zknd_zkne_zknh_zks_zksed_zksh_zkt_zmmul_sdext_sdtrig_smpmp_xcfu
../rtl/core/neorv32_cpu.vhd:168:5:@0ms:(assertion note): [NEORV32] CPU tuning options: fast_mul fast_shift
../rtl/core/neorv32_cpu.vhd:175:5:@0ms:(assertion warning): [NEORV32] Assuming this is a simulation.
../rtl/core/neorv32_imem.vhd:61:3:@0ms:(assertion note): [NEORV32] Implementing processor-internal IMEM as pre-initialized ROM.
../rtl/core/neorv32_trng.vhd:298:3:@0ms:(assertion note): [neoTRNG] The neoTRNG (v3.3) - A Tiny and Platform-Independent True Random Number Generator, https://github.com/stnolting/neoTRNG
../rtl/core/neorv32_trng.vhd:308:3:@0ms:(assertion warning): [neoTRNG] Simulation-mode enabled (NO TRUE/PHYSICAL RANDOM)!
../rtl/core/neorv32_debug_auth.vhd:44:3:@0ms:(assertion warning): [NEORV32] using DEFAULT on-chip debugger authenticator. Replace by custom module.
(5)
## ## ## ##
## ## ######### ######## ######## ## ## ######## ######## ## ################
#### ## ## ## ## ## ## ## ## ## ## ## ## ## #### ####
## ## ## ## ## ## ## ## ## ## ## ## ## ## ###### ##
## ## ## ######### ## ## ######### ## ## ##### ## ## #### ###### ####
## ## ## ## ## ## ## ## ## ## ## ## ## ## ###### ##
## #### ## ## ## ## ## ## ## ## ## ## ## #### ####
## ## ######### ######## ## ## ## ######## ########## ## ################
## ## ## ##
Hello world! :)| 1 | Notifier that "simulation mode" of UART0 is enabled (by the USER_FLAGS+=-DUART0_SIM_MODE makefile flag). All UART0 output is send to the simulator console. |
| 2 | Final executable size (text) and static data memory requirements (data, bss). |
| 3 | The application code is installed as pre-initialized IMEM. This is the default approach for simulation. |
| 4 | List of (default) arguments that were send to the simulator. Here: maximum simulation time (10ms). |
| 5 | Execution of the actual program starts. UART0 TX data is printed right to the console. |
8. Building the Documentation
The data sheet and user guide is written using asciidoc. The according source files
can be found in docs. The documentation of the software framework is written in-code using doxygen.
A makefiles in the project’s docs directory is provided to build all of the documentation as HTML pages
or as PDF documents.
|
Pre-Built PDFs
Pre-rendered PDFs are available online as nightly pre-releases: https://github.com/stnolting/neorv32/releases/tag/nightly_release
The HTML-based documentation is also available online at the project’s GitHub Page.
|
The makefile provides a help target to show all available build options and their according outputs.
neorv32/docs$ make helpasciidoctorneorv32/docs$ make html|
Using Containers for Building
If you don’t have asciidoctor / asciidoctor-pdf installed, you can still generate all the documentation using
a docker container via make container.
|
9. Zephyr RTOS Support
The NEORV32 processor is supported by upstream Zephyr RTOS: https://docs.zephyrproject.org/latest/boards/others/neorv32/doc/index.html
The absolute path to the NEORV32 executable image generator binary (…/neorv32/sw/image_gen) has to be added to the PATH variable
so the Zephyr build system can generate executables and memory-initialization images.
|
| Zephyr OS port provided by GitHub user henrikbrixandersen (see https://github.com/stnolting/neorv32/discussions/172). |
10. FreeRTOS Support
A NEORV32-specific port and a simple demo for FreeRTOS (https://github.com/FreeRTOS/FreeRTOS) are available in a separate repository on GitHub: https://github.com/stnolting/neorv32-freertos
11. LiteX SoC Builder Support
LiteX is a SoC builder framework by Enjoy-Digital that allows easy creation of complete system-on-chip designs - including sophisticated interfaces like Ethernet, serial ATA and DDR memory controller. The NEORV32 has been ported to the LiteX framework to be used as central processing unit.
The default microcontroller-like NEORV32 processor is not directly supported as all the peripherals would provide some redundancy. Instead, the LiteX port uses a core complex wrapper that only includes the actual NEORV32 CPU, the instruction cache (optional), the RISC-V machine system timer (optional), the on-chip debugger (optional) and the internal bus infrastructure. The specific implementation of optional modules as well as RISC-V ISA configuration and performance optimization options are controlled by a single CONFIGURATION option wrapped in the LiteX build flow. The external bus interface is used to connect to other LiteX SoC parts.
|
Core Complex Wrapper
The NEORV32 core complex wrapper used by LiteX for integration can be found in
rtl/system_integration/neorv32_litex_core_complex.vhd.
|
|
LiteX Port Documentation
More information can be found in the "NEORV32" section of the LiteX project wiki: https://github.com/enjoy-digital/litex/wiki/CPUs
|
11.1. LiteX Setup
-
Install LiteX and the RISC-V compiler following the excellent quick start guide: https://github.com/enjoy-digital/litex/wiki#quick-start-guide
-
The NEORV32 port for LiteX uses GHDL and yosys for converting the VHDL files via the GHDL-yosys-plugin. You can download prebuilt packages for example from https://github.com/YosysHQ/fpga-toolchain, which is _no longer maintained. It is superdesed by https://github.com/YosysHQ/fpga-toolchain.
-
EXPERIMENTAL: GHDL provides a synthesis options, which converts a VHDL setup into a plain-Verilog module (not tested on LiteX yet). Check out neorv32-verilog for more information.
|
GHDL-yosys Plugin
If you would like to use the experimental GHDL Yosys plugin for VHDL on Linux or MacOS, you will need to set
the GHDL_PREFIX environment variable. e.g. export GHDL_PREFIX=<install_dir>/fpga-toolchain/lib/ghdl.
On Windows this is not necessary.If you are using an existing Makefile set up for ghdl-yosys-plugin and see ERROR: This version of yosys is built without plugin support you probably need to remove -m ghdl from your yosys parameters. This is
because the plugin is typically loaded from a separate file but it is provided built into yosys in this
package.- from https://github.com/YosysHQ/fpga-toolchain This means you might have to edit the call to yosys in litex/soc/cores/cpu/neorv32/core.py.
|
-
Add the
binfolder of the ghdl-yosys-plugin to yourPATHenvironment variable. You can test your yosys installation and check for the GHDL plugin:
$ yosys -H
/----------------------------------------------------------------------------\
| |
| yosys -- Yosys Open SYnthesis Suite |
| |
| Copyright (C) 2012 - 2020 Claire Xenia Wolf <claire@yosyshq.com> |
| |
| Permission to use, copy, modify, and/or distribute this software for any |
| purpose with or without fee is hereby granted, provided that the above |
| copyright notice and this permission notice appear in all copies. |
| |
| THE SOFTWARE IS PROVIDED "AS IS" AND THE AUTHOR DISCLAIMS ALL WARRANTIES |
| WITH REGARD TO THIS SOFTWARE INCLUDING ALL IMPLIED WARRANTIES OF |
| MERCHANTABILITY AND FITNESS. IN NO EVENT SHALL THE AUTHOR BE LIABLE FOR |
| ANY SPECIAL, DIRECT, INDIRECT, OR CONSEQUENTIAL DAMAGES OR ANY DAMAGES |
| WHATSOEVER RESULTING FROM LOSS OF USE, DATA OR PROFITS, WHETHER IN AN |
| ACTION OF CONTRACT, NEGLIGENCE OR OTHER TORTIOUS ACTION, ARISING OUT OF |
| OR IN CONNECTION WITH THE USE OR PERFORMANCE OF THIS SOFTWARE. |
| |
\----------------------------------------------------------------------------/
Yosys 0.10+12 (open-tool-forge build) (git sha1 356ec7bb, gcc 9.3.0-17ubuntu1~20.04 -Os)
-- Running command `help' --
... (1)
ghdl load VHDL designs using GHDL (2)
...| 1 | A long list of plugins… |
| 2 | This is the plugin we need. |
11.2. LiteX Simulation
Start a simulation right in your console using the NEORV32 as target CPU:
$ litex_sim --cpu-type=neorv32LiteX will start running its BIOS:
__ _ __ _ __
/ / (_) /____ | |/_/
/ /__/ / __/ -_)> <
/____/_/\__/\__/_/|_|
Build your hardware, easily!
(c) Copyright 2012-2022 Enjoy-Digital
(c) Copyright 2007-2015 M-Labs
BIOS built on Jul 19 2022 12:21:36
BIOS CRC passed (6f76f1e8)
LiteX git sha1: 0654279a
--=============== SoC ==================--
CPU: NEORV32-standard @ 1MHz
BUS: WISHBONE 32-bit @ 4GiB
CSR: 32-bit data
ROM: 128KiB
SRAM: 8KiB
--============== Boot ==================--
Booting from serial...
Press Q or ESC to abort boot completely.
sL5DdSMmkekro
Timeout
No boot medium found
--============= Console ================--
litex> help
LiteX BIOS, available commands:
flush_cpu_dcache - Flush CPU data cache
crc - Compute CRC32 of a part of the address space
ident - Identifier of the system
help - Print this help
serialboot - Boot from Serial (SFL)
reboot - Reboot
boot - Boot from Memory
mem_cmp - Compare memory content
mem_speed - Test memory speed
mem_test - Test memory access
mem_copy - Copy address space
mem_write - Write address space
mem_read - Read address space
mem_list - List available memory regions
litex>You can use the provided console to execute LiteX commands.
12. MicroPython Port
A simple out-of-tree port of MicroPython for the NEORV32 RISC-V Processor can be found in a separate repository: https://github.com/stnolting/neorv32-micropython
|
Work-In-Progress
This port is still under development. Hence, it supports just some simple modules and
methods yet. However, it is already fully operational.
|
MicroPython v1.25.0 on 2025-04-20; neorv32-default with neorv32
Type "help()" for more information.
>>> help("modules")
__main__ collections machine sys
array gc micropython time
builtins io struct
Plus any modules on the filesystem>>> import machine
>>> machine.info()
NEORV32 version 1.11.2.9
Clock: 150000000 Hz
MISA: 0x40901105
MXISA: 0x66006cd3
SoC: 0x480ba97b
>>> import time
>>> time.localtime()
(2025, 4, 20, 19, 52, 46, 6, 110)
>>> import builtins
>>> builtins.neorv32.help()
neorv32 - helper functions:
gpio_pin_set(pin, level) - Set GPIO.output [pin] to [level]
gpio_pin_toggle(pin) - Toggle GPIO.output [pin]
systick_set_callback(callback) - Call [callback] from SysTICK IRQ
help() - Show this text13. Rust Support
The easiest way to get started writing Rust for the NEORV32 is via the embassy-neorv32 crate which provides RISC-V runtime support and a safe, high-level hardware abstraction layer (HAL) for interacting with various hardware peripherals. Embassy is a lightweight async executor popular among the embedded Rust community; however, the HAL is designed to work with any async executor. Additionally, the HAL provides blocking methods for interacting with most supported peripherals, so not even an executor is needed. Check out the examples to see how it can be used!
|
Supported Peripherals
Although the most common/important NEORV32 peripherals are supported by the HAL, not all of them are
yet. Please check the README for an up-to-date list of supported peripherals. If a peripheral that
you need is currently unsupported, please open an issue. Or better yet, PRs are highly welcome and
encouraged ;)
|
Rust HALs are typically designed to be safe and ergonomic to use, though at the cost of some flexibility. When finer-grained control is needed, the peripheral access crate (PAC) provided by neorv32-pac can be used standalone or alongside the HAL. PACs act as thin wrappers around raw peripheral register access, and thus offer no higher-level abstractions or safety guarantees, but provide maximum flexibility in using the hardware.
14. Using the On-Chip Debugger
The NEORV32 on-chip debugger ("OCD") allows online in-system debugging via an external JTAG access port.
The general flow is independent of the host machine’s operating system. However, this tutorial uses
Windows and Linux (Ubuntu on Windows / WSL) in parallel running the upstream version of OpenOCD and the
RISC-V GNU debugger gdb.
|
TLDR
You can start a pre-configured debug session (using default main.elf as executable and
target extended-remote localhost:3333 as GDB connection configuration) by using the GDB
makefile target: make gdb
|
14.1. Hardware Requirements
Connect a JTAG adapter to the according NEORV32 jtag_* top interface signals:
| NEORV32 top signal | JTAG signal | Default FTDI port |
|---|---|---|
|
TCK |
D0 |
|
TDI |
D1 |
|
TDO |
D2 |
|
TMS |
D3 |
|
JTAG TAP Reset
The NEORV32 JTAG TAP does not provide a dedicated reset signal ("TRST"). However, this
is not a problem since JTAG-level resets can be triggered using TMS signaling.
|
14.2. OpenOCD
The NEORV32 on-chip debugger can be accessed using the upstream version of OpenOCD.
A pre-configured OpenOCD configuration file is provided: sw/openocd/neorv32.*.cfg
|
Interface Configuration
You might need to adapt the default interface configuration in sw/openocd/lib/interface.cfg
according to your JTAG adapter and your operating system.
|
To access the processor using OpenOCD, open a terminal and start OpenOCD with the pre-configured configuration file.
neorv32.cfg scriptneorv32\sw\openocd>openocd.exe -f neorv32.cfg
xPack Open On-Chip Debugger 0.12.0+dev-02228-ge5888bda3-dirty (2025-10-04-22:44)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
Target: neorv32 single-core
Error: libusb_open() failed with LIBUSB_ERROR_NOT_FOUND
Info : clock speed 2000 kHz
Info : JTAG tap: neorv32.cpu tap/device found: 0x00000001 (mfg: 0x000 (<invalid>), part: 0x0000, ver: 0x0)
Info : datacount=1 progbufsize=2
Info : Disabling abstract command reads from CSRs.
Info : Examined RISC-V core; found 2 harts
Info : hart 0: XLEN=32, misa=0x40901106
Info : [neorv32.cpu] Examination succeed
Info : [neorv32.cpu] starting gdb server on 3333
Info : Listening on port 3333 for gdb connections
Authentication passed.
Info : JTAG tap: neorv32.cpu tap/device found: 0x00000001 (mfg: 0x000 (<invalid>), part: 0x0000, ver: 0x0)
Target RESET and HALTED. Ready for remote connections.
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connectionsNow the processor should be reset, halted and openOCD is waiting for connections.
14.3. Debugging with GDB
|
System View Description (SVD)
Together with a third-party plugin the processor’s SVD file can be imported right into GDB to allow comfortable
debugging of peripheral/IO devices (see https://github.com/stnolting/neorv32/discussions/656).
|
This guide uses the simple "blink example" from sw/example/demo_blink_led as test application to
show the basics of in-system debugging.
At first, the application needs to be compiled.
Navigate to sw/example/demo_blink_led and compile the application:
neorv32/sw/example/demo_blink_led$ make clean_all allBeyond others, this will generate an ELF file main.elf that contains all the symbols required for debugging.
Open another terminal in sw/example/demo_blink_led and start gdb.
.../neorv32/sw/example/demo_blink_led$ riscv32-unknown-elf-gdb
GNU gdb (GDB) 10.1
Copyright (C) 2020 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law.
Type "show copying" and "show warranty" for details.
This GDB was configured as "--host=x86_64-pc-linux-gnu --target=riscv32-unknown-elf".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<https://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word".
(gdb)Now connect to OpenOCD using the default port 3333 on your machine.
We will use the previously generated ELF file main.elf from the demo_blink_led example.
Finally, upload the program to the processor and start execution.
(gdb) target extended-remote localhost:3333 (1)
Remote debugging using localhost:3333
warning: No executable has been specified and target does not support
determining executable automatically. Try using the "file" command.
0xffff0c94 in ?? () (2)
(gdb) file main.elf (3)
A program is being debugged already.
Are you sure you want to change the file? (y or n) y
Reading symbols from main.elf...
(gdb) load (4)
Loading section .text, size 0xd0c lma 0x0
Loading section .rodata, size 0x39c lma 0xd0c
Start address 0x00000000, load size 4264
Transfer rate: 43 KB/sec, 2132 bytes/write.
(gdb) c (5)| 1 | Connect to OpenOCD |
| 2 | The CPU was still executing code from the bootloader ROM - but that does not matter here |
| 3 | Select mail.elf from the demo_blink_led example |
| 4 | Upload the executable |
| 5 | Start execution |
You can halt execution at any time by CTRL+c. Then you can inspect the code, dump and alter variables,
set breakpoints, step through the code, etc.
14.4. Segger Embedded Studio
Software for the NEORV32 processor can also be developed and debugged in-system using Segger Embedded Studio and a Segger J-Link probe. The following links provide further information as well as an excellent tutorial.
-
Segger Embedded Studio: https://www.segger.com/products/development-tools/embedded-studio
-
Segger notes regarding NEORV32: https://wiki.segger.com/J-Link_NEORV32
-
Excellent tutorial: https://www.emb4fun.com/riscv/ses4rv/index.html
15. NEORV32 in Verilog
If you are more of a Verilog fan or if your EDA toolchain does not support VHDL/mixed-language designs you can use GHDL to convert an all-Verilog version of NEORV32. GHDL’s synthesis feature is used to convert a pre-configured NEORV32 setup - including all peripherals, memories and memory images - into a single plain-Verilog module.
|
GHDL Synthesis
More information regarding GHDL’s synthesis option can be found at https://ghdl.github.io/ghdl/using/Synthesis.html.
|
An intermediate VHDL wrapper is provided neorv32_verilog_wrapper.vhd that is used to configure the processor (using VHDL generics) and to customize the interface ports. After conversion, a single Verilog file is generated neorv32_verilog_wrapper.v`) that contains the whole NEORV32 processor. The original processor module hierarchy is preserved as well as all module interface names, which allows inspection/debugging of simulation waveforms and synthesis results.
The actual conversion is conducted by a single Makefile, which analyzes all the processor’s sources and
finally calls GHDL synth to create the final Verilog code. After conversion, the interface of the resulting
neorv32_verilog_wrapper Verilog module is shown in the console which can be used as instantiation template.
neorv32/rtl/verilog$ make convert
Converting to Verilog: neorv32_verilog_wrapper.vhd -> neorv32_verilog_wrapper.v
...
-----------------------------------------------
Verilog instantiation prototype
-----------------------------------------------
module neorv32_verilog_wrapper
(input clk_i,
input rstn_i,
input uart0_rxd_i,
output uart0_txd_o);
-----------------------------------------------Conversion Notes
-
GHDL synthesis generates an un-optimized plain Verilog code without any (technology-specific) primitives. However, optimizations will be performed by the technology-specific synthesis tool.
-
The output of the GHDL synthesis is a post-elaboration result. Therefore, all the processor’s configuration options (i.e. VHDL generics) are resolved before the actual output is generated. Hence, the entity of the conversion wrapper must not have any generic.
-
The interface of the resulting Verilog module lists all inputs first followed by all outputs.
-
The original module hierarchy is preserved as well as all module interface names and many internal signal names.
-
VHDL records are collapsed into linear arrays.
15.1. Verilog Simulation
A simple Verilog testbench is provided (neorv32/rtl/verilog/testbench.v) to simulate the default conversion
output. The testbench includes a UART receiver connected to the processor’s UART0; received characters are send
to the simulator console. The simulation can be started right from the Makefile and it supports
[Icarus Verilog](https://github.com/steveicarus/iverilog) and [Verilator](https://github.com/verilator/verilator)
as simulators:
-
Icarus Verilog:
neorv32/rtl/verilog$ make SIMULATOR=iverilog sim -
Verilator:
neorv32/rtl/verilog$ make SIMULATOR=verilator sim
As the default VHDL wrapper enabled the build-in bootloader, the simulation UART receiver checks for the
the bootloader intro string (“NEORV32”). As soon as this string has been received Simulation successful!
is printed to the console.
Running simulation with Icarus Verilog
NEORV32 Verilog testbench
NEORV32
Simulation successful!
testbench.v:83: $finish called at 81865950 (100ps)|
Generating Waveform Data
The Verilog simulator will emit waveform data if the DUMP_WAVE variable is set to 1. Example:
neorv32-verilog$ make SIMULATOR=verilator DUMP_WAVE=1 sim
Waveform data is stored as wave.fst.
|
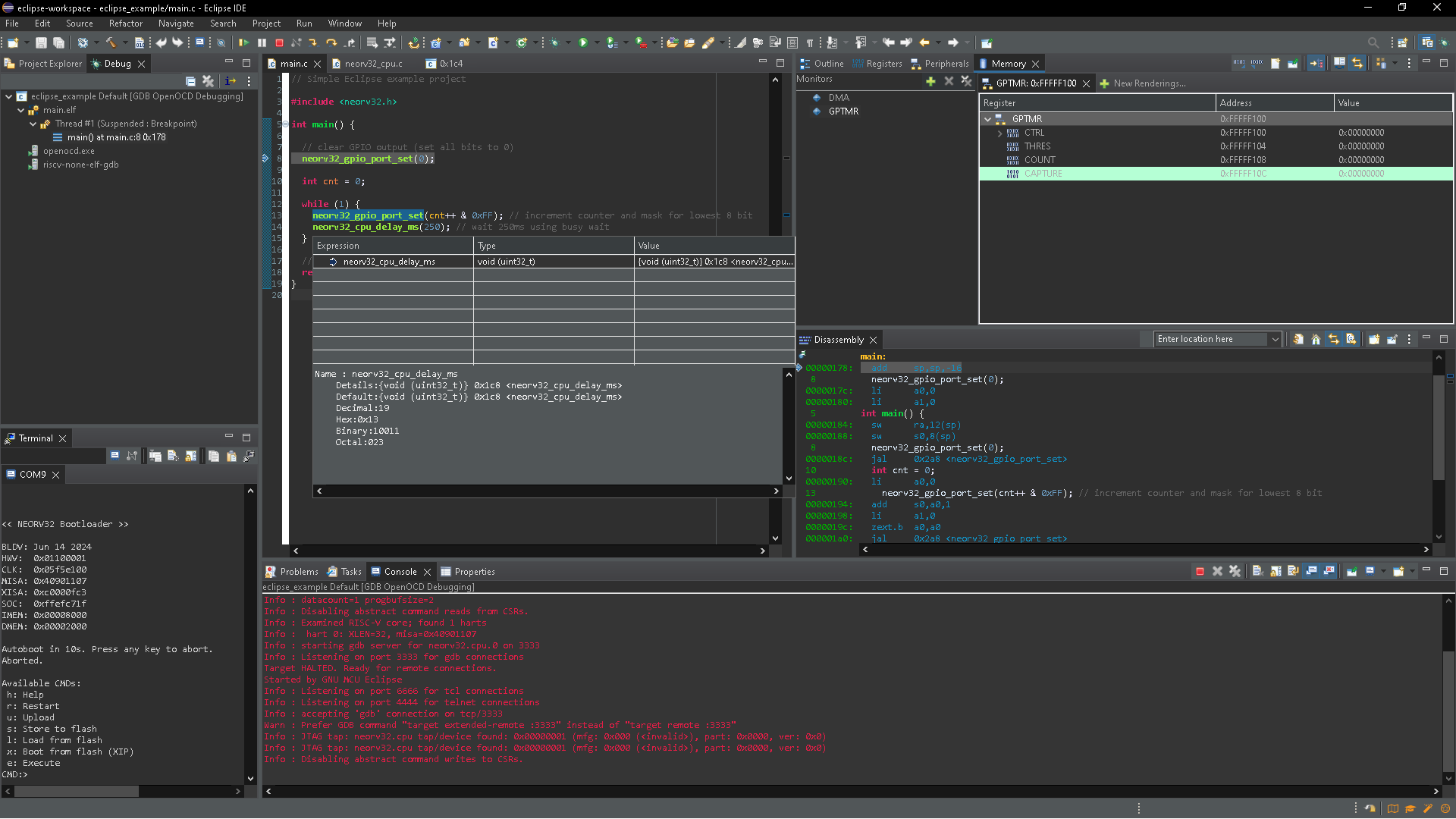
16. Eclipse IDE
Eclipse (https://www.eclipse.org/) is a free and open-source interactive development environment that can be used to develop, debug and profile application code for the NEORV32 RISC-V Processor. This chapter shows how to import the provided example setup from the NEORV32 project repository. Additionally, all the required steps to create a compatible project from scratch are illustrated in this chapter.
|
This is a Makefile-Based Eclipse Project!
Note that the provided Eclipse example project (as well as the setup tutorial in this section) implements a
makefile-based project. Hence, the makefile in the example folder is used for building the application
instead of the Eclipse-managed build system. Therefore, all compiler options, include folder, source files,
etc. have to be defined within this makefile.
|
16.1. Eclipse Prerequisites
The following tools are required:
-
Eclipse IDE (Eclipse IDE for Embedded C/C++ Developers): https://www.eclipse.org/downloads/
-
Precompiled RISC-V GCC toolchain: e.g. https://github.com/xpack-dev-tools/riscv-none-elf-gcc-xpack
-
Precompiled OpenOCD binaries: e.g. https://github.com/xpack-dev-tools/openocd-xpack
-
Build tools like
makeand busybox: e.g. https://github.com/xpack-dev-tools/windows-build-tools-xpack
|
XPack Windows Build Tools
Some NEORV32 makefile targets relies on the basename command which might not be part of the default
XPack Windows Build Tools. However, you can just open the according bin folder, copy busybox.exe
and rename that copy to basename.exe.
|
16.2. Import The Provided Eclipse Example Project
A preconfigured Eclipse project is available in neorv32/sw/example/eclipse.
To import it:
-
Open Eclipse.
-
Click on File > Import, expand General and select Projects from Folder or Archive.
-
Click Next.
-
Click on Directory and select the provided example project folder (see directory above).
-
Click Finish.
|
NEORV32 Folder and File Paths
The provided example project uses relative paths for including all the NEORV32-specific files and folders
(in the Eclipse configuration files). Note that these paths need to be adjusted when moving the example setup
to a different location.
|
|
Tool Configuration
Make sure to adjust the binaries / installation folders of the RISC-V GCC toolchain, openOCD and Windows build tools
according to your installation. See the section Configure Build Tools for more information.
|
|
Makefile Adjustment
Make sure to adjust the variables inside the project’s makefile to match your processor
configuration (memory sizes, CPU ISA configuration, etc.):
https://stnolting.github.io/neorv32/#_application_makefile
|
16.3. Setup a new Eclipse Project from Scratch
This chapter shows all the steps required to create an Eclipse project for the NEORV32 entirely from scratch.
16.3.1. Create a new Project
-
Select File > New > Project.
-
Expand C/C** and select **C project.
-
In the C++ Project wizard:
-
Enter a Project name.
-
Uncheck the box next to Use default location and specify a location using Browse where you want to create the project.
-
From the Project type list expand Makefile project and select Empty Project.
-
Select RISC-V Cross GCC from the Toolchain list on the right side.
-
Click Next.
-
Skip the next page using the default configuration by clicking Next.
-
-
In the GNU RISC-V Cross Toolchain wizard configure the Toolchain name and Toolchain path according to your RISC-V GCC installation.
-
Example:
Toolchain name: xPack GNU RISC-V Embedded GCC (riscv-none-elf-gcc) -
Example:
Toolchain path: C:\Program Files (x86)\xpack-riscv-none-elf-gcc-13.2.0-2\bin
-
-
Click Finish.
If you need to reconfigure the RISC-V GCC binaries and/or paths:
-
right-click on the project in the left view, select Properties
-
expand MCU and select RISC-V Toolchain Paths
-
adjust the Toolchain folder and the Toolchain name if required
-
Click Apply.
16.3.2. Add Initial Files
Start a simple project by adding two initial files. Further files can be added later. Only the makefile is really relevant here.
-
Add a new file by right-clicking on the project and select New > File and enter
main.cin the filename box. -
Add another new file by right-clicking on the project and select New > File and enter
makefilein the filename -
Copy the makefile of an existing NEORV32 example program and paste it to the new (empty) makefile.
16.3.3. Add Build Targets (optional)
This step adds some of the targets of the NEORV32 makefile for easy access. This step is optional.
-
In the project explorer right-click on the project and select Build Target > Create….
-
Add “all” as Target name (keep all the default checked boxes).
-
Repeat these steps for all further targets that you wish to add (e..g
clean_all,exe,elf).
|
Clean-All Target
Adding the clean_all target is highly recommended. Executing this target once after importing the project ensures
that there are no (incompatible) artifacts left from previous builds.
|
|
Available Target
See the NEORV32 data sheet for a list and description of all available makefile targets:
https://stnolting.github.io/neorv32/#_makefile_targets
|
16.3.4. Configure Build Tools
This step is only required if your system does not provide any build tools (like make) by default.
-
In the project explorer right-click on the project and select Properties.
-
Expand MCU and click on Build Tools Path.
-
Configure the Build tools folder.
-
Example:
Build tools folder: C:/xpack/xpack-windows-build-tools-4.4.1-2/bin
-
-
Click Apply and Close.
16.3.5. Adjust Default Build Configuration (optional)
This will simplify the auto-build by replacing the default make all command by make elf. Thus, only
the required main.elf file gets generated instead of all executable files (like HDL and memory image files).
-
In the project explorer right-click on the project and select Properties.
-
Select C/C++ Build and click on the Behavior Tab.
-
Update the default targets in the Workbench Build Behavior box:
-
Build on resource save:
elf(only build the ELF file) -
Build (Incremental build):
elf(only build the ELF file) -
Clean:
clean(only remove project-local build artifacts)
-
-
Click Apply and Close.
16.3.6. Add NEORV32 Software Framework
-
In the project explorer right-click on the project and select Properties.
-
Expand C/C++ General, click on Paths and Symbols and highlight Assembly under Languages.
-
In the Include tab click Add…
-
Check the box in front of Add to all languages and click on File System… and select the NEORV32 library include folder (
path/to/neorv32/sw/lib/include). -
Click OK.
-
-
In the Include tab click Add….
-
Check the box in front of Add to all languages and click on File System… and select the NEORV32 commons folder (
path/to/neorv32/sw/common). -
Click OK.
-
-
Click on the Source Location tab and click Link Folder…*.
-
Check the box in front of Link to folder in the system and click the Browse button.
-
Select the source folder of the NEORV32 software framework (
path/to/neorv32/sw/lib/source). -
Click OK.
-
-
Click Apply and Close.
16.3.7. Setup OpenOCD
-
In the project explorer right-click on the project and select Properties.
-
Expand MCU and select OpenOCD Path.
-
Configure the Executable and Folder according to your openOCD installation.
-
Example:
Executable: openocd.exe -
Example:
Folder: C:\OpenOCD\bin -
Click Apply and Close.
-
-
In the top bar of Eclipse click on the tiny arrow right next to the Debug bug icon and select Debug Configurations.
-
Double-click on GDB OpenOCD Debugging; several menu tabs will open on the right.
-
In the Main tab add
main.elfto the C/C++ Application box. -
In the Debugger tab add the NEORV32 OpenOCD script with a
-fin front of it- -
Example:
Config options: -f ${ProjDirPath}/../../openocd/neorv32.cfg -
In the Startup tab uncheck he box in front of Initial Reset and add
monitor reset haltto the box below. -
In the "Common" tab mark Shared file to store the run-configuration right in the project folder instead of the workspace(optional).
-
In the SVD Path tab add the NEORV32 SVD file (
path/to/neorv32/sw/svd/neorv32.svd).
-
-
Click Apply and then Close.
|
Default Debug Configuration
When you start debugging the first time you might need to select the provided debug configuration:
GDB OpenOCD Debugging > eclipse_example Default
|
|
Debug Symbols
For debugging the ELF has to compiled to contain according debug symbols.
Debug symbols are enabled by the project’s local makefile: USER_FLAGS += -ggdb -gdwarf-3
(this configuration seems to work best for Eclipse - at least for me).
|
If you need to reconfigure OpenOCD binaries and/or paths:
-
right-click on the project in the left view, select Properties
-
expand MCU and select OpenOCD Path
-
adjust the Folder and the Executable name if required
-
Click Apply.
16.3.8. Setup Serial Terminal
A serial terminal can be added to Eclipse by installing it as a plugin. I recommend "TM Terminal" which is already installed in some Eclipse bundles.
Open a TM Terminal serial console:
-
Click on Window > Show View > Terminal to open the terminal.
-
A Terminal tab appears on the bottom. Click the tiny screen button on the right (or press Ctrl+Alt+Shift) to open the terminal configuration.
-
Select Serial Terminal in Choose Terminal and configure the settings according to the processor’s UART configuration.
Installing TM Terminal from the Eclipse market place:
-
Click on Help > Eclipse Marketplace….
-
Enter "TM Terminal" to the Find line and hit enter.
-
Select TM Terminal from the list and install it.
-
After installation restart Eclipse.
16.4. Eclipse Setup References
-
Eclipse help: https://help.eclipse.org/latest/index.jsp
-
Importing an existing project into Eclipse: https://help.eclipse.org/latest/index.jsp?topic=%2Forg.eclipse.cdt.doc.user%2Fgetting_started%2Fcdt_w_import.htm
-
Eclipse OpenOCD Plug-In: https://eclipse-embed-cdt.github.io/debug/openocd/
17. Legal
About
The NEORV32 RISC-V Processor
https://github.com/stnolting/neorv32
Stephan Nolting, M.Sc.
stnolting[ät]gmail[dot]com
European Union, Germany
DOI
This project provides a digital object identifier (DOI) provided by zenodo: https://doi.org/10.5281/zenodo.5018888
License
BSD 3-Clause License
Copyright (c) NEORV32 contributors.
Copyright (c) 2020 - 2026, Stephan Nolting. All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
-
Redistributions of source code must retain the above copyright notice, this list of conditions and the following disclaimer.
-
Redistributions in binary form must reproduce the above copyright notice, this list of conditions and the following disclaimer in the documentation and/or other materials provided with the distribution.
-
Neither the name of the copyright holder nor the names of its contributors may be used to endorse or promote products derived from this software without specific prior written permission.
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
|
SPDX Identifier
SPDX-License-Identifier: BSD-3-Clause
|
Proprietary Notice
-
"GitHub" is a subsidiary of Microsoft Corporation.
-
"Vivado" and "Artix" are trademarks of AMD Inc.
-
"ARM", "AMBA", "AXI", "AXI4", "AXI4-Lite" and "AXI4-Stream" are trademarks of Arm Holdings plc.
-
"ModelSim" is a trademark of Mentor Graphics – A Siemens Business.
-
"Quartus [Prime]" and "Cyclone" are trademarks of Intel Corporation.
-
"iCE40", "UltraPlus" and "Radiant" are trademarks of Lattice Semiconductor Corporation.
-
"GateMate" is a trademark of Cologne Chip AG.
-
"Windows" is a trademark of Microsoft Corporation.
-
"Tera Term" copyright by T. Teranishi.
-
"NeoPixel" is a trademark of Adafruit Industries.
-
"Segger Embedded Studio" and "J-Link" are trademarks of Segger Microcontroller Systems GmbH.
-
Images/figures made with Microsoft Power Point.
-
Diagrams made with WaveDrom.
-
Documentation made with
asciidoctor.
All further/unreferenced projects/products/brands belong to their according copyright holders. No copyright infringement intended.
Disclaimer
This project is released under the BSD 3-Clause license. NO COPYRIGHT INFRINGEMENT INTENDED. Other implied or used projects/sources might have different licensing – see their according documentation for more information.
Limitation of Liability for External Links
This document contains links to the websites of third parties ("external links"). As the content of these websites is not under our control, we cannot assume any liability for such external content. In all cases, the provider of information of the linked websites is liable for the content and accuracy of the information provided. At the point in time when the links were placed, no infringements of the law were recognizable to us. As soon as an infringement of the law becomes known to us, we will immediately remove the link in question.
Acknowledgments
A big shout-out to the community and all the contributors, who helped improving this project! This project would not be where it is without them. ❤️
RISC-V - instruction sets want to be free!
Continuous integration provided by GitHub Actions and powered by GHDL.